Abstract
According to World Health Organization (WHO) there are 285 million people are visually impaired worldwide. The amount consists of 39 million blind people and 246 million of low vision. Today, the problem we face is that people who are blind or have low vision often have difficulty in navigating the outdoor environment. They often need assistance for their movement. Hence, this project is to propose a solution for the blind people in navigating outdoor environment. The project develops device that uses ultrasonic sensor to sense object located around the device. This device will help user to navigate the environment easily without the help of any assistance.
Objectives
|
To develop an assistive technology model to help visually-impaired people to navigate in an indoor environment
Vertical Divider
|
To implement the design of the model into the Smart Cane
Vertical Divider
|
To test and evaluate whether the Smart Cane is fully functioned
|
What is SMART CANE?
|
|
Smart Cane is a walking cane consist of an Arduino Uno programming board, Ultrasonic sensors and vibrator motors embedded to it. It is function when there is an obstacle detected around the Smart Cane, it will emits different patterns of vibration to the user. From the variety of vibration, the user can estimate the distance of obstacles around them. Hence, will make them walk around the environment safer and faster without any assistance of other human being.
Can be used with all age groups, from children to old people.
|
Framework
|
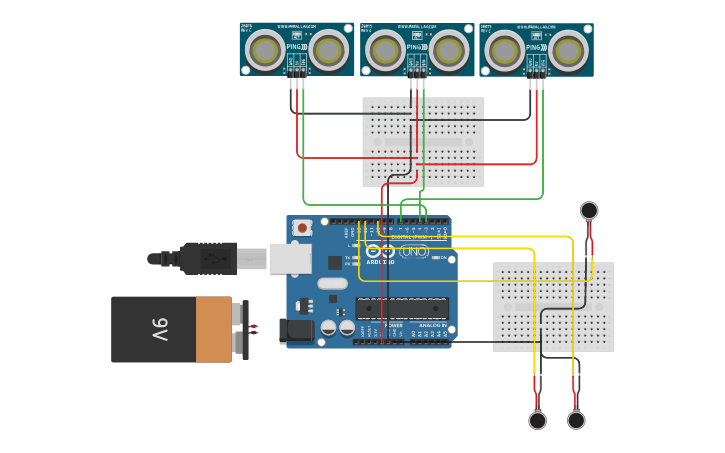
The core of the Smart Cane is the Arduino Uno programming board. The circuit consists of three 0834 flat vibration coin mini motor. The negative pins of each vibrator motor are connected to Arduino GND, while the positive pins of each vibrator motor are connected to Arduino D13, Arduino D12 and Arduino D10 repestively. Three Ultrasonic Sensors have been placed for obstacles detection - 2nd Ultrasonic Sensor(Front Sensor) is placed at 0°, 1st Ultrasonic Sensor(Right Sensor) is placed at -90° and 3rd Ultrasonic Sensor(Left Sensor) is placed at +90° with respect to the Front Sensor.
Obstacles can be detected from front, left and right of the Smart Cane. The variety of the vibrator motor are:
|
|
Circuit Diagram
|
|
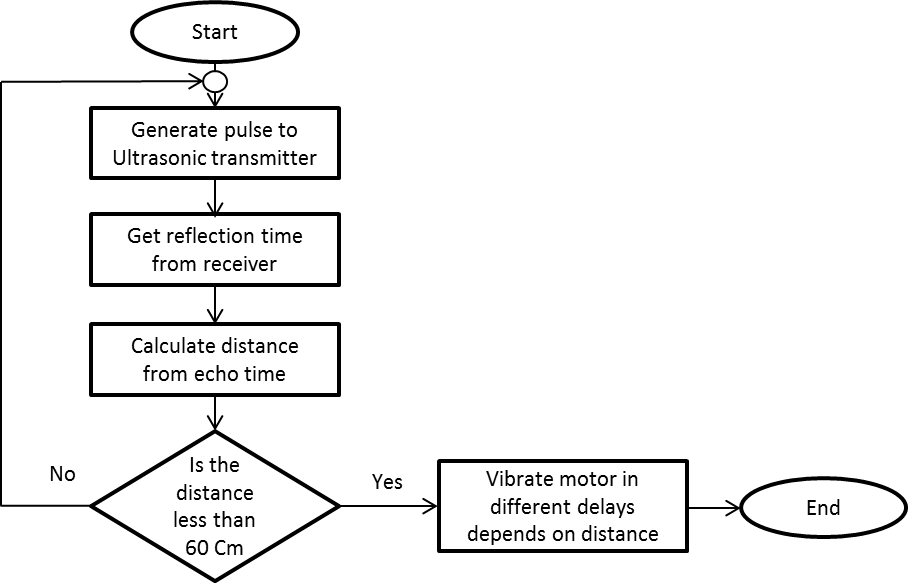
Flowchart
|
The flowchart of the Smart Cane shows that when the power is on, all of the Ultrasonic Sensors will generate pulses to Ultrasonic transmitter. When the waves of the pulse hits an obstacle it will reflect back to the receiver to get the reflection time. From the reflection time of the waves, the distance of the obstacle can be calculated using the formula :-
distance = (duration/2) / 29.1; The program will make a decision where if the distance calculated is less than 60cm it will emits different delays of vibration depends on the distance. The lower the distance, the smaller the delays between each vibration. The bigger the distance emits larger delays between each vibration. The program will end when the power from the power supply is turn off. |
|
